Symmetries of robotic systems
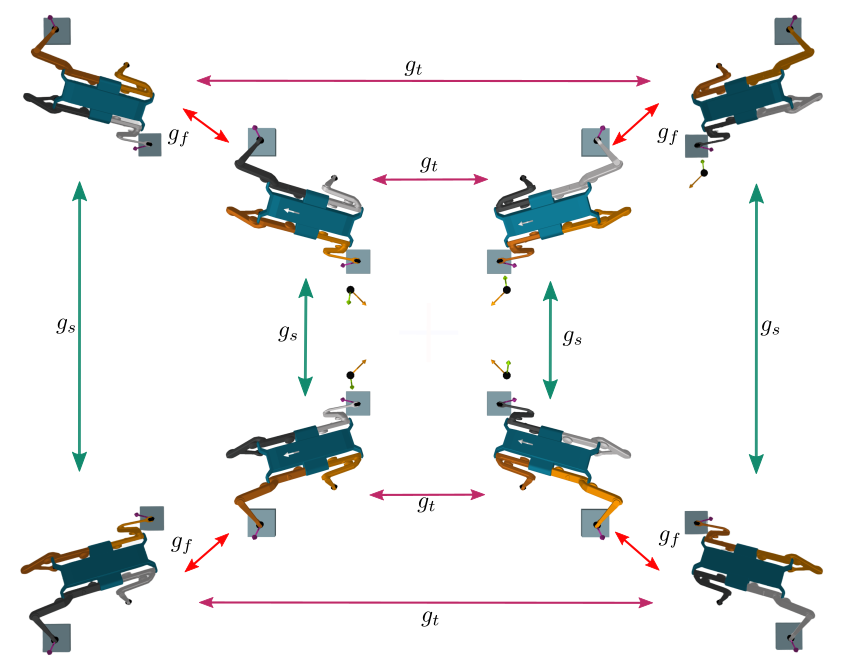
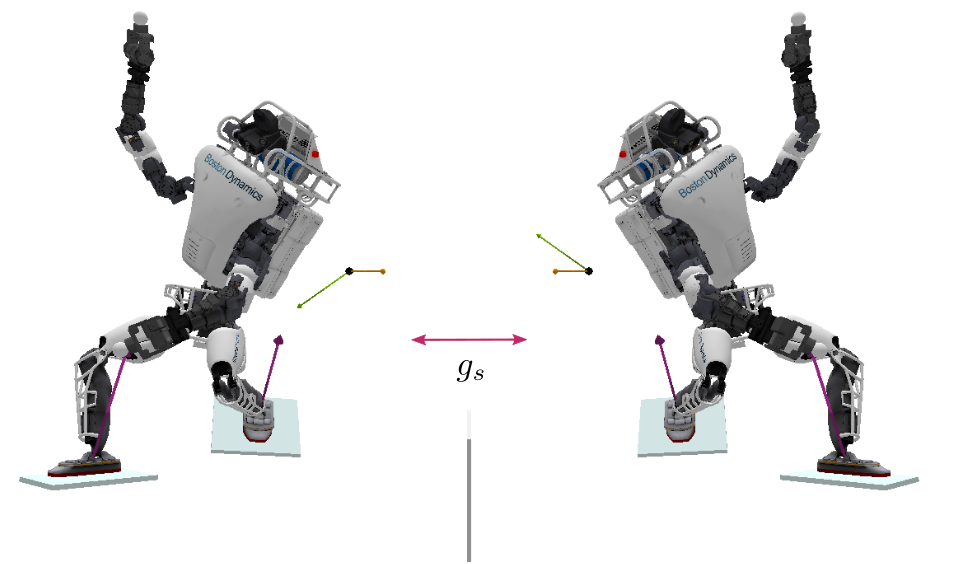
In the context of dynamical systems, a symmetry is a state transformation that results in another functionally equivalent state under the governing dynamics. This work particularly focuses Discrete Morphological Symmetries. Formally, these are discrete (or finite) symmetry groups that capture the equivariance of the robot’s dynamics, arising from the duplication of rigid bodies and kinematic chains. These symmetries are ubiquitous on biological and artificial locomoting systems, such as legged, swimming, and flying animals/robots/virtual characters. As an example consider the Mini-Cheetah robot, which has a C2xC2xC2 symmetry group, as shown in the figure below.
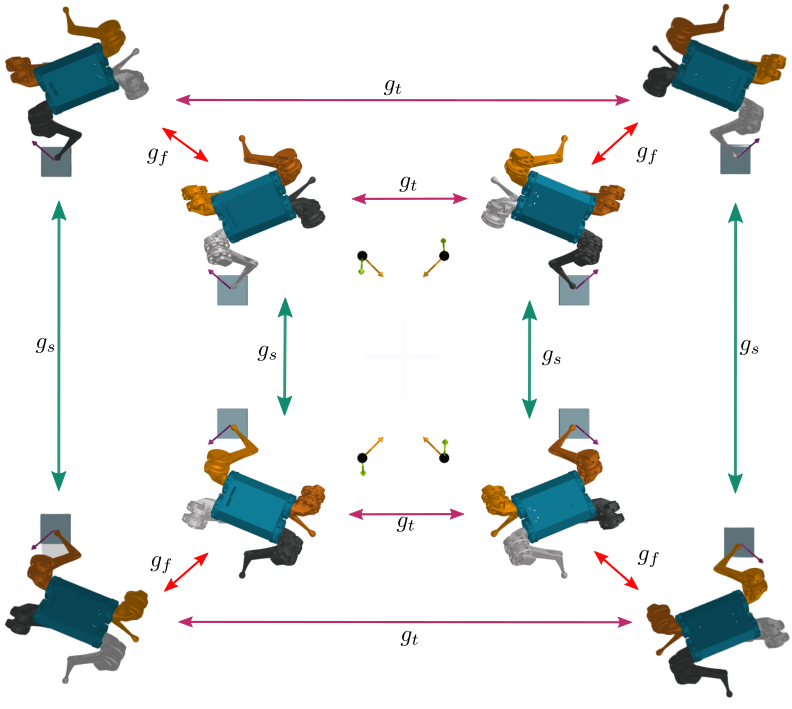
Symmetries provide a valuable geometric bias, as modeling and controlling the dynamics of a single state suffices to identify and control the dynamics of all of its symmetric states:
Furthermore, symmetries also provide a valuable bias for data-driven applications as we can use techniques of data-augmentation to multiply the number of samples recorded from our robot operation by the number of symmetries of the system. Or we can use symmetric function approximators, such as equivariant neural networks, to address any learning problem involving proprioceptive or exteroceptive data measurements.